
如何用 Arduino 製作藍牙遙控車:逐步指南
2 分鐘
- 步驟 1:定義 Arduino 藍牙車的機械與電氣系統
- 步驟 2:為 Arduino Nano 遙控車 PCBA 選擇元件
- 步驟 3:設計 Arduino Nano 藍牙遙控車的電路圖
- 步驟 4:設計雙輪機器人車 PCBA 的 PCB 佈局
- 步驟 5:使用 PCBA 服務製造 Arduino Nano 藍牙遙控車
- 步驟 6:為 Arduino Nano 藍牙車控制編寫程式
- 步驟 7:使用手機控制 Arduino 藍牙遙控車
- 步驟 8:測試與優化 Arduino 藍牙控制車
- 結論
- 常見問題
本教學將逐步說明如何在一塊特別設計的 PCBA(印刷電路板組裝)上,使用 Arduino Nano 模組完成一輛雙輪藍牙遙控車的完整工程設計與實作。
雖然許多愛好者一開始會使用麵包板和跳線來連接馬達與藍牙模組,但這種方法容易發生斷線和訊號雜訊。本指南將升級這個過程,教您如何設計專業的主機板。
主要設計特點:
● 控制器:使用 Arduino Nano 作為可插拔模組。
● 驅動系統:兩個 N20 直流減速馬達,配置為差速驅動。
● 驅動器:表面黏著型 TB6612FNG MOSFET 驅動器。
● 製造:專業組裝 [PCB 組裝服務 → JLCPCB PCBA] 以確保可靠性。
步驟 1:定義 Arduino 藍牙車的機械與電氣系統
選擇差速驅動系統
這個機器人不依賴阿克曼轉向(像真實汽車那樣),而是採用差速驅動系統。
機制: 配置包含兩個強大的 N20 直流馬達,它們可以獨立運作,並位於底盤的兩側。
轉向邏輯:
前進: 兩個馬達以相同速度旋轉(VL = VR)。
轉彎: 一個馬達比另一個旋轉得慢(VL ≠ VR)。
■ 左轉: VL > VR
■ 右轉: VL < VR
零半徑轉彎: 馬達以相反方向旋轉。
穩定性: 使用一個前置被動球型腳輪作為第三個接觸點,以減少摩擦並實現全向移動。
規劃電氣架構
本專案中的中央處理單元是 Arduino Nano。它控制三個最重要的子系統:
1. 通訊: 處理來自 HC-05 藍牙模組通過 UART 進行的數據傳輸。
2. 馬達控制: 為馬達驅動器產生 PWM 訊號。
3. 電源分配: 調節電池電壓以供邏輯電路和馬達驅動使用。
至關重要的是,馬達驅動器 IC 隔離了 Arduino Nano 敏感的邏輯引腳,使其免受 N20 馬達產生的高電感電壓尖峰的影響。
如果電池電壓低於馬達的額定電壓,則會使用升壓轉換器(例如 XL6009)通過馬達驅動器向馬達提供全電壓,從而提高電池電壓。
| 子系統 | 元件 | 用途 |
|---|---|---|
| 控制器 | Arduino Nano | 馬達與藍牙控制邏輯 |
| 馬達 | N20 直流馬達 (x2) | 差速驅動致動 |
| 升壓模組 | XL6009 | 從電池升壓 |
| 通訊 | HC-05 | 藍牙 UART 介面 |
| 支撐 | 球型腳輪 | 前方機械穩定性 |
使用 N20 馬達的 Arduino Nano 藍牙遙控車系統概覽表
步驟 2:為 Arduino Nano 遙控車 PCBA 選擇元件
選擇正確的元件對於構建機器人 PCB 組裝是必要的。
| 元件 | 數量 | 備註 |
|---|---|---|
| Arduino Nano | 1 | 可插拔模組(排針安裝) |
| N20 直流馬達 | 2 | 差速驅動 (6V-12V) |
| TB6612FNG | 1 | 雙 H 橋驅動器 (SMD) |
| XL6009 | 1 | 升壓轉換器模組 |
| 翹板開關 | 1 | 用作切換(開/關)的斷路開關 |
| HC-05 | 1 | 藍牙 UART 模組 |
| 球型腳輪 | 1 | 前方被動支撐 |
使用 N20 馬達的 Arduino Nano 藍牙遙控車 PCBA 物料清單表
步驟 3:設計 Arduino Nano 藍牙遙控車的電路圖
分配 Arduino Nano 引腳用於馬達和藍牙控制
正確的引腳映射對於 PWM 產生至關重要。
| 功能 | Arduino Nano 引腳 |
|---|---|
| 馬達 A PWM | D5(支援 PWM) |
| 馬達 A 方向 | D6, D7 |
| 馬達 B PWM | D10(支援 PWM) |
| 馬達 B 方向 | D8, D9 |
| 藍牙 RX | D0 (RX) |
| 藍牙 TX | D1 (TX) |
周邊設備的 Arduino Nano 引腳分配
為差速驅動連接馬達驅動器
● 輸入: AIN1/AIN2 連接到 Nano D6/D7 以控制方向(順時針/逆時針),而 BIN1/BIN2 連接到 Nano D8/D9 以控制方向(順時針/逆時針)。
● 速度: PWMA/PWMB 連接到 Nano D5/D10。
● 待機: TB6612FNG 上的 STBY 引腳必須拉高(至 VCC)或由 GPIO 控制以啟用馬達。
● 輸出: AO1、AO2 和 BO1、BO2 連接到左側 N20 馬達端子。
連接藍牙模組以實現手機控制
直接連接: HC-05 TX 連接到 Arduino RX,HC-05 RX 連接到 Arduino TX
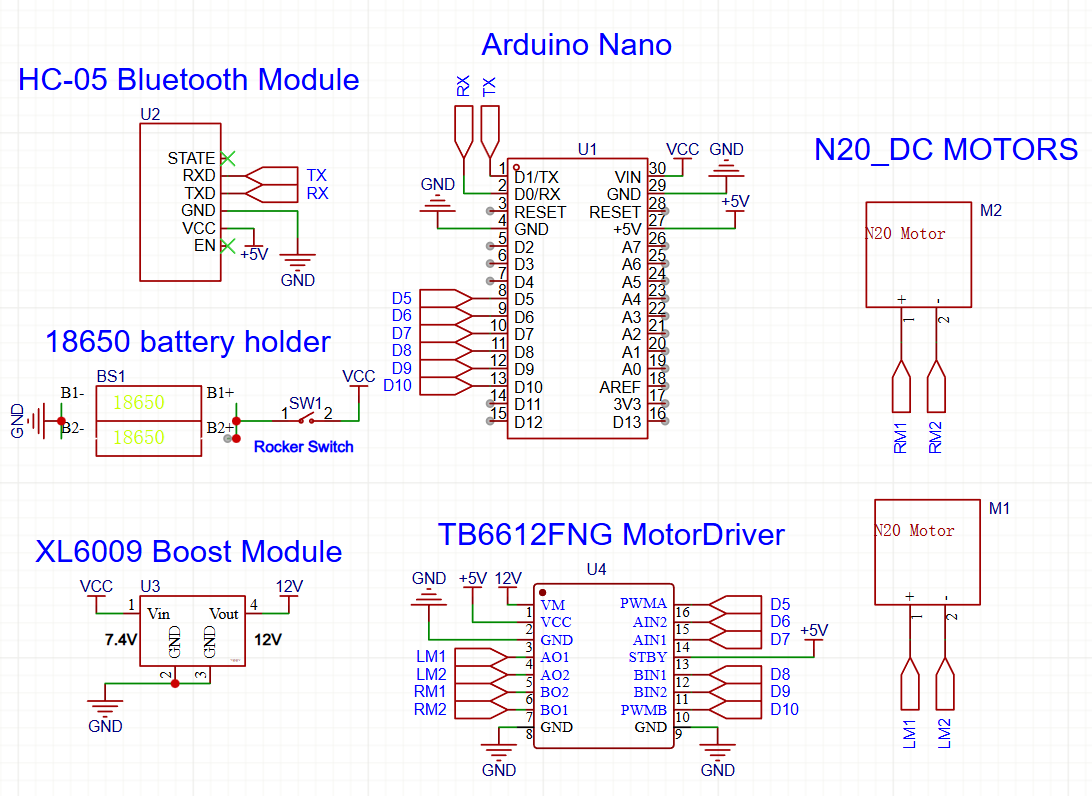
Arduino 藍牙控制雙輪遙控車(使用 N20 馬達)的電路圖
步驟 4:設計雙輪機器人車 PCBA 的 PCB 佈局
優化元件佈局
● 置中: 電池座應精確定位在中間,以便重量均勻分佈。
● 邊緣放置: 將 HC-05 模組放置在電路板邊緣。PCB 銅箔區域不應延伸到藍牙天線區域下方,以避免訊號屏蔽。
● 連接器: 將用於 N20 馬達的 JST 或螺絲端子精確放置在馬達實際安裝的位置,以縮短導線長度。
在 PCB 上安全佈線高電流馬達走線(關鍵設計技巧)
● 走線寬度: 承載通往 N20 馬達電源的走線必須夠寬。使用計算器(IPC-2221)來確定尺寸,至少能承受 1A 連續電流(通常 ≥ 20 mil)。
● 迴路面積: 保持馬達電流的去程和回程路徑靠近,以最小化電感和輻射雜訊。
● GND 鋪銅: PCB 上的 GND 鋪銅會用連接到地的銅箔填滿開放區域,建立一個實心的接地平面。它的作用是減少 EMI、提供低阻抗訊號返迴路徑、幫助散熱以及穩定電壓,這對於複雜或高速設計中的訊號品質和生產非常重要。
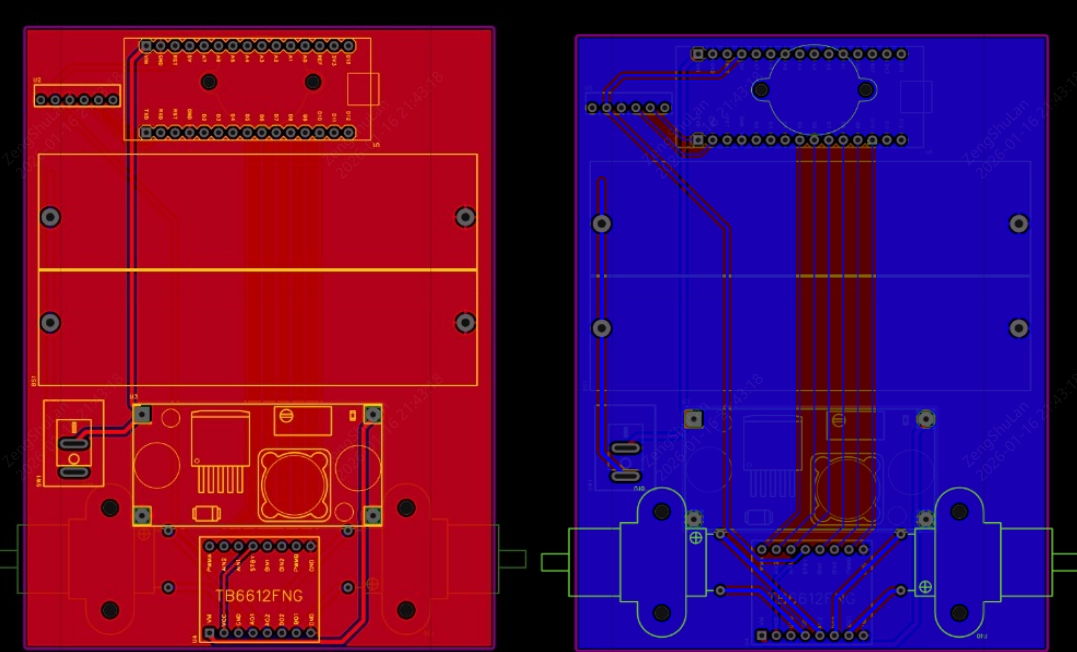
針對 PCBA 優化的 Arduino 藍牙遙控車 PCB 佈局
步驟 5:使用 PCBA 服務製造 Arduino Nano 藍牙遙控車
產生用於 PCBA 的 Gerber、BOM 和 Pick-and-Place 文件
要使用 JLCPCB PCBA 服務,您必須從您的 EDA 軟體(例如 EasyEDA 或 KiCad)匯出三個特定文件:
1. Gerber 文件: 定義物理銅層、阻焊層和鑽孔。
2. BOM(物料清單): 一個包含製造商零件編號的元件列表。
3. CPL(元件放置列表): SMT 貼片機的座標(X、Y、旋轉)。
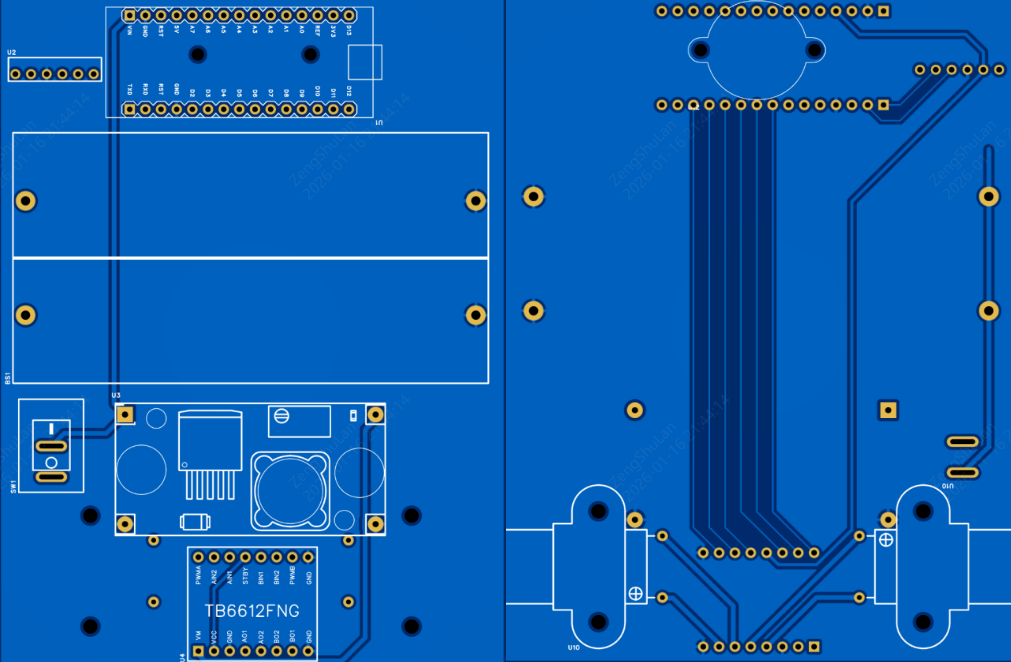
JLCPCB 2D Gerber 檢視器顯示不含元件的 Arduino 遙控車電路板走線。
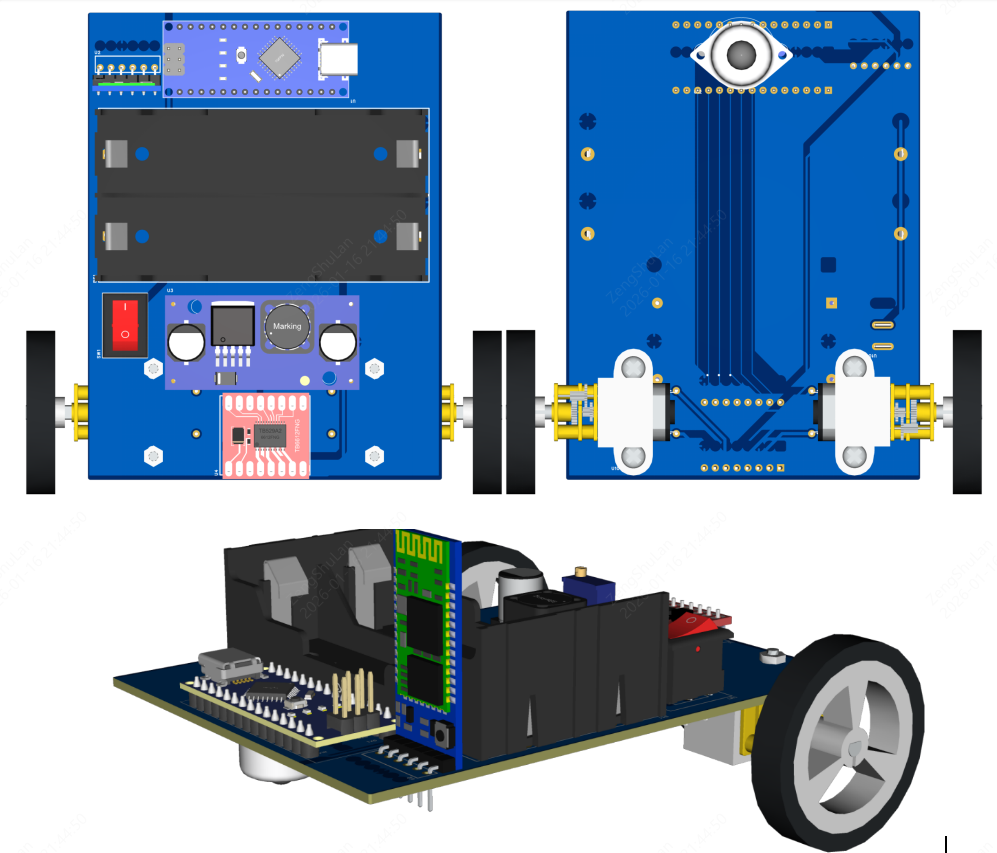
3D 預覽顯示已組裝的元件
在 JLCPCB 訂購 Arduino 藍牙控制車的 PCB 和 PCBA
完成設計後,您可以按照以下步驟訂購您的組裝電路板:
1. 上傳 Gerber 文件: 前往 JLCPCB 網站並上傳包含您 Gerber 文件的 zip 檔案。檢視器將顯示您的電路板設計。
JLCPCB 訂單頁面,顯示裸 PCB 的 Gerber 檢視
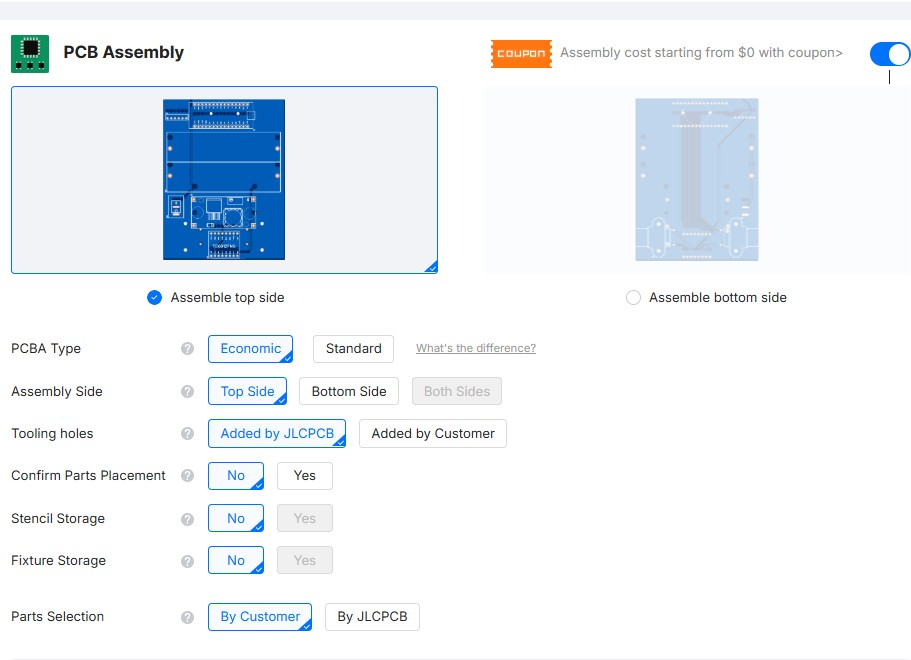
2. 選擇 PCBA: 將「PCB 組裝」選項切換為 開啟。
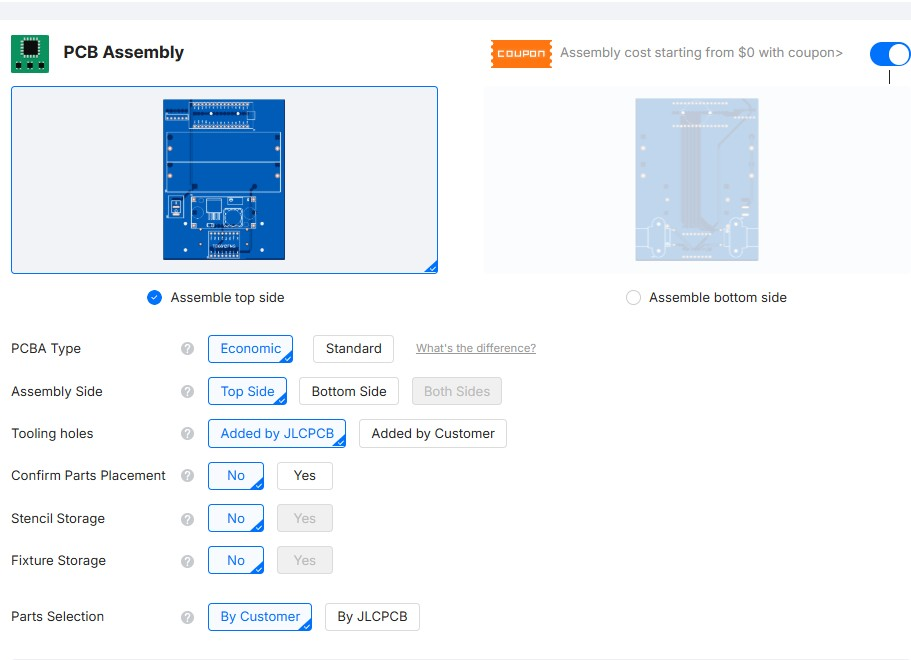
PCBA 訂單經濟型頂面
3. 選擇設定: 選擇「組裝頂面」(因為我們的 SMT 元件在頂面),然後根據您的複雜度決定「經濟型」或「標準型」組裝。
4. 上傳 BOM 和 CPL: 上傳在前一步驟產生的特定文件。
5. 零件選擇: 系統會將您的 BOM 項目與 JLCPCB 零件庫進行比對。驗證零件並查看 3D 預覽以確認方向正確。
6. 訂購: 前往結帳。JLCPCB 工程師將在開始生產前進行 DFM(可製造性設計)審查。
為何 PCBA 使 Arduino 藍牙控制車更可靠
● 抗雜訊能力: 與充當天線的跳線相比,實心 PCB 接地平面大幅減少了電磁干擾。
● 抗震性: N20 馬達會產生振動。PCB 上的焊點比麵包板連接更耐用。
| 指標 | 麵包板 | PCBA |
|---|---|---|
| 抗雜訊能力 | 差 | 高 |
| 耐用性 | 低(導線容易鬆脫) | 高(焊接) |
| 可重複性 | 低 | 極佳 |
Arduino Nano 機器人車的麵包板接線與 PCBA 比較
步驟 6:為 Arduino Nano 藍牙車控制編寫程式
構建用於遙控車控制的 Arduino 韌體
所以程式碼的作用是接收來自序列埠的字元,並將其轉換為馬達差速。
#include <SoftwareSerial.h>
// 馬達引腳
const int enA = 5;
const int inA1 = 6;
const int inA2 = 7;
const int enB = 10;
const int inB1 = 8;
const int inB2 = 9;
// ... 定義其他引腳
void setup() {
Serial.begin(9600); // 藍牙鮑率
pinMode(enA, OUTPUT);
pinMode(inA1, OUTPUT);
pinMode(inA2, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(inB1, OUTPUT);
pinMode(inB2, OUTPUT);
}
void loop(){
//您的邏輯程式碼放在這裡
}
實作差速驅動邏輯
● 左轉: 當右馬達以速度 X 向前旋轉,而左馬達停止或向後旋轉時,機器人左轉。
○ 程式碼邏輯:
analogWrite(RightMotor, 200);
analogWrite(LeftMotor, 0);
● 右轉: 左馬達以速度 X 向前旋轉,而右馬達停止或向後旋轉。
○ 程式碼邏輯:
analogWrite(RightMotor, 0);
analogWrite(LeftMotor, 200);
● 原地旋轉(零半徑):
○ 程式碼邏輯:左馬達向後,右馬達向前。
加入安全邏輯以防止馬達和電源故障
● 故障安全: 如果藍牙連線中斷,機器人的動作應停止,而不是繼續行駛。
● 緩升: 應避免 PWM 從 0 立即跳到 255,以保護 N20 馬達內的塑膠齒輪。
步驟 7:使用手機控制 Arduino 藍牙遙控車
將藍牙模組與行動裝置配對
1. 為 PCBA 通電。HC-05 LED 應快速閃爍(配對模式)。
2. 在手機上開啟藍牙設定,並與「HC-05」配對。
3. PIN 碼: 通常是 1234 或 0000。
使用藍牙手機 App 控制遙控車
使用標準的「藍牙電子」App。
● 配置: 將「前進」箭頭按鈕對應到發送字元 'F'。將「左轉」對應到 'L',以此類推。
● 數據流: 手機 App → 藍牙 —> HC-05 $\rightarrow$ Arduino Nano (RX) → 韌體邏輯 → TB6612FNG → 馬達。
步驟 8:測試與優化 Arduino 藍牙控制車
對 PCBA 和馬達進行電氣測試
在插入 Nano 之前:
1. 使用電池為電路板供電。
2. 三用電表檢查:測量排針上的 5V 引腳。必須是穩定的 5V。如果是 7V 以上,請勿插入 Nano!
3. 堵轉電流:在抓住車輪的同時測量電流,確保熱走線不會過熱。
驗證機械性能
● 平衡: 確保電池置中,以免機器人傾倒。
● 腳輪阻力: 如果前方球型腳輪有拖曳現象,請潤滑它或更改 N20 馬達支架的高度。
結論
本教學展示了如何透過 PCBA,將一輛簡單的雙輪 Arduino Nano 藍牙遙控車提升為一個可靠的工程專案。
使用專業製造取代麵包板,可確保您的機器人能為 N20 馬達提供完美的動力、擁有不中斷的藍牙通訊,並且機械強度足以應對實際應用。
準備好開始您的製作了嗎?
匯出您的 Gerber 文件,並透過 JLCPCB PCBA 入口網站開始您的 Arduino Nano PCBA 專案,立即製造您的客製化電路板!
常見問題
問題 1:如果 TB6612FNG 驅動器在零件庫中缺貨怎麼辦?
JLCPCB 擁有龐大的零件庫,但庫存狀況會變動。您可以使用「預訂」選項為您保留零件,或者查看列為相容的 L9110S 驅動器是否符合您的電壓需求,作為替代方案。
問題 2:我需要訂購鋼板嗎?
如果您使用 PCBA 服務,則不需要。JLCPCB 會製作自己的內部鋼板來塗抹錫膏。只有當您打算自己在家焊接 SMT 零件時,才需要鋼板。
問題 3:JLCPCB 的「基礎」和「擴展」零件有什麼區別?
「基礎」零件已裝載在送料器上,無需人工費用。「擴展」零件則需要少量人工費用來裝載卷盤。為了節省成本,在選擇電阻、電容和 LED 時,請篩選「基礎」零件。
問題 4:我可以用標準的 9V 電池為這個 PCBA 供電嗎?
我們強烈建議不要這樣做。標準的 9V (PP3) 電池無法提供馬達所需的高電流。請使用 2S 鋰離子電池組 (7.4V) 或 6 顆 AA 電池以獲得可靠的性能。
問題 5:為什麼插入藍牙模組時,程式碼上傳會失敗?
HC-05 使用與 USB 連接埠相同的硬體序列引腳(D0/D1)。在將草稿碼上傳到 Arduino Nano 期間,您必須斷開藍牙模組,或者可以在藍牙模組的電源線上添加一個開關。
持續學習
ESP32 與 Raspberry Pi:2026 年該如何選擇?
電池供電的智慧農業感測器與採用電腦視覺的工業檢測相機,雖然都屬於「物聯網(IoT)」範疇,但兩者的硬體需求截然不同。ESP32 與 Raspberry Pi 經常是硬體選型的核心,工程師卻常將它們視為可以直接替代的產品來比較。 實際上,前者專為超低功耗與確定性即時控制而設計,後者則將 Linux 多工處理及高運算效能帶到邊緣端。 本指南將說明: MCU 與 SBC 的架構差異 ESP32 與 Raspberry Pi 的效能及功耗比較 ESP32 與 Raspberry Pi 在物聯網及機器人領域的應用 ESP32 上的 TinyML 與 Raspberry Pi 上的邊緣 AI 同時採用兩種平台的混合式邊緣 AI 架構 ESP32 與 Raspberry Pi 專案的 PCB 設計注意事項 圖:ESP32-S3 與 Raspberry Pi 5 比較,並標示主要特色。 ESP32 與 Raspberry Pi 快速比較 若是電池供電的物聯網節點、即時感測器控制及裝置端 TinyML 推論,ESP32 是較合適的選擇。 Raspberry Pi 則適合 Linux 多工處理、電腦視覺及邊緣 AI ......
LED 符號指南:意義、電路圖、極性與類型
LED 符號是現代電路設計中最常用的電子符號之一。您會在電源指示燈、微控制器電路及 RGB 照明系統中看到 LED 符號。 無論是閱讀簡單電路圖,還是設計複雜的多層 PCB,瞭解 LED 電路圖符號都是正確閱讀及設計電子電路的基本能力。本指南將完整介紹發光二極體符號,從基本結構一路說明至實際 PCB 工作流程。 本指南將說明: LED 符號圖及其意義 極性:陽極與陰極 LED、一般二極體與光電二極體的差異 如何閱讀 LED 電路 符號方向規則 SMD 與 THT LED 符號 RGB LED 符號基礎 LED 封裝尺寸:0402、0603、5050 從電路圖到 PCB 圖:LED 電路圖符號,以及印刷電路板上發光中的實體 LED。 什麼是 LED 符號? LED 符號是在二極體符號旁加上兩個向外箭頭,用來表示光線向外發射。 更精確地說,它是發光二極體(Light Emitting Diode)的電路圖表示方式。 符號由指向垂直線的三角形,也就是標準二極體形狀,以及兩個代表光子發射的斜向箭頭組成。 此符號由最新版 IEC 60617 定義;這是目前仍有效的國際電路圖圖形符號標準。 注意事項 先前的 ......
如何讀懂 MOSFET 符號:NMOS、PMOS、箭頭與本體二極體
如果您曾經打開原理圖,看著 MOSFET 符號困惑哪個端子是源極、為什麼閘極中間有間隙,或為什麼兩個看似相同的符號箭頭方向卻不同——您並不孤單。 MOSFET 原理圖符號會在一個小圖形中包含四項獨立資訊:通道極性、工作模式、端子識別,以及元件類型。只要正確讀懂這四個線索,無論是在功率電子資料表、CMOS 邏輯圖,還是 EDA 元件庫中遇到 MOSFET 符號,都能立刻看懂。 本指南涵蓋內容: 如何識別 NMOS 與 PMOS 符號 IEEE/IEC 符號與簡化 IC 符號中的箭頭方向如何不同 增強型與耗盡型 MOSFET 符號 三端子與四端子 MOSFET 符號 功率 MOSFET 中的本體二極體方向 資料表、CMOS 原理圖與 EDA 工具中使用的 MOSFET 符號慣例 如何讀懂 MOSFET 符號:5 個視覺線索 圖:N 通道增強型 MOSFET 符號的原理圖拆解 特徵 意義 箭頭向內 NMOS(詳細樣式) 箭頭向外 PMOS(詳細樣式) 虛線通道 增強型(常關,Normally OFF) 實線通道 耗盡型(常通,Normally ON) 閘極泡泡 PMOS(IC 樣式) 這五個視覺線索,足......
斷路器符號解析:IEC、ANSI、MCB 與極數配置符號
電氣原理圖是電力系統、控制電路與印刷電路板的通用語言。在這些圖面中,斷路器符號是最關鍵的元素之一。正確理解它,對安全、故障排查與製造都至關重要。 即使只是把斷路器與手動開關或隔離開關混淆,也可能在工廠現場或維修作業中造成災難性的誤判。 本指南提供一份完整且技術準確的參考,協助您閱讀與繪製斷路器符號,重點涵蓋實際工業型錄、單線圖與標準 CAD 圖面配置。 電氣圖面中斷路器符號的意義 在診斷或安裝原理圖中,斷路器符號表示電力網路中的某個位置,在該處電流可以被手動切換,或在異常情況下自動切斷。它告訴工程師,依據基本接點上附加的限定符號,該電路分支可能受到熱過載、短路或接地漏電保護。 斷路器符號參考表 以下快速參考表,整理了住宅配線圖、工業控制盤與 PCB 設計中常見的標準符號。 IEC 斷路器符號 標準 IEC 帶叉開關:帶有叉號或星號限定符的斜向開關接點。這是標準歐洲原理圖符號。 具隔離功能的斷路器:帶有叉號/星號限定符的斜向接點,並在端子處加入垂直短線。 ANSI 斷路器符號 ANSI 方框符號:位於導線上的方形方框。這是北美標準單線圖符號。 ANSI 接點間隙:標準開關接點間隙,並帶有小型弧形圖形......
Arduino LED 驅動器教學:使用 74HC595 與 MAX7219 控制更多 LED
在較大型的 LED 專案中,Arduino GPIO 腳位很快就會不夠用。透過使用專用 LED 驅動器與擴充 IC,你可以大幅減少腳位使用量,消除占用處理器資源的多工掃描迴圈,並簡化顯示器接線。 在本指南中,你將了解 74HC595 移位暫存器與 MAX7219 LED 驅動器的運作架構、接線配置、級聯技巧與最佳化策略。 為什麼 Arduino 專案需要 LED 驅動 IC Arduino GPIO 與電流限制 基於 ATmega328P 的 Arduino Uno 具有實體限制,使其不可能直接驅動大規模 LED: 單一腳位最大電流:單一數位 I/O 腳位可安全連續供應或吸收的最大電流為 20 mA連續電流,絕對峰值限制為 40 mA。 整體封裝限制:流經微控制器主要 VCC 與 GND 腳位的總電流不得超過 200 mA。 實體腳位不足:Arduino Uno 只有 14 個數位 I/O 腳位與 6 個類比輸入腳位。 如果你嘗試同時驅動 16 顆標準 15 mA LED,就會要求微控制器封裝提供 240 mA 電流,這會違反安全工作範圍,並可能導致矽晶片瞬間熱損毀。 LED 多工控制與 LED ......
二極體測試終極指南:萬用表設定、讀值與診斷
快速答案:如何測試二極體 若要使用萬用表檢查二極體,請將裝置設定為二極體測試模式。 將紅色表筆接在陽極,黑色表筆接在陰極。 健康的矽二極體在正向偏壓下,良好讀值通常為 0.5V 至 0.8V;在反向偏壓下則會顯示 OL(Open Loop,開路)。 判斷二極體是否損壞其實很簡單:兩個方向都顯示 OL,代表二極體開路;兩個方向都接近 0V,則代表二極體短路。 了解如何測試二極體,是排查故障電源供應器、異常電路,或無法上電 PCB 的最快方法之一。使用數位萬用表,你可以快速判斷二極體是否正常工作、短路或開路。 本指南將說明如何將萬用表設定為二極體測試模式、讀取正向偏壓與反向偏壓數值、分辨良好二極體與開路或短路二極體、比較電路內與電路外測試,以及處理特定類型二極體,包括整流二極體、蕭特基二極體、齊納二極體、LED 與橋式整流器。 二極體極性:如何辨識陽極與陰極 了解二極體極性,是成功測試二極體的第一步: 電流方向:在正向偏壓下,電流會從陽極,也就是正端,流向陰極,也就是負端。 實體標記:軸向二極體上的印刷條紋或色環,標示的是陰極側。對表面黏著二極體而言,請尋找小橫線或雷射蝕刻線。 電路圖符號:符號由指向......