
Arduino LED 多工控制教學:用更少腳位控制更多 LED
4 分鐘
- 什麼是 Arduino LED 多工控制?
- Arduino LED 多工控制技術比較
- 如何製作 Arduino 8x8 LED 矩陣
- 如何實作 Arduino LED Charlieplexing
- Arduino LED 多工控制故障排除
- 實用 Arduino LED 多工控制專案
- 結論
- Arduino LED 多工控制常見問題
Arduino Uno 是一款強大的原型開發工具,但如果直接驅動多顆 LED,很快就會耗盡它的 20 個 GPIO 腳位,以及 200 mA 的封裝總電流絕對最大限制。為了繞過這些硬體瓶頸,工程師與創客會使用 LED 多工控制,以更有效率地擴展顯示輸出,而不需要升級微控制器。
在本指南中,你將學到 LED 矩陣掃描、Charlieplexing、刷新時序、鬼影修正,以及實用 Arduino 程式碼的核心原理,而且不需要依賴任何外部驅動 IC 或擴充 IC。
什麼是 Arduino LED 多工控制?
Arduino Uno GPIO 限制說明
每一個基於 ATmega328P 的 Arduino Uno GPIO 腳位都有嚴格的電氣限制。
- 絕對最大值:單一 GPIO 腳位在峰值、非連續條件下,最高可 source 或 sink 40 mA。
- 建議限制:連續輸出的安全工作限制為每個腳位 20 mA 或更低。
- 封裝總電流限制:關鍵在於,通過晶片 VCC 與 GND 腳位的總合電流不得超過 200 mA。
如果嘗試直接驅動 4x4 的 16 顆 LED 陣列,且每顆 LED 為 15 mA,總需求將達到 240 mA,可能造成矽晶片永久性熱損壞。
警告:
絕對不要在沒有電流限制電阻的情況下,將 LED 直接連接到微控制器腳位。這會造成過大的電流消耗,可能立即燒壞 LED 或 Arduino 本身。
LED 多工控制中的視覺暫留
LED 多工控制依賴一種稱為 視覺暫留(Persistence of Vision,PoV) 的生理現象。人眼無法察覺大約快於 50 至 100 Hz 的光強變化,也就是週期約 10 至 20 毫秒。
如果一顆 LED 亮起 1 毫秒,接著熄滅 9 毫秒,並且這個循環持續重複,人眼會把這些光脈衝整合起來。與其看到閃爍的光,我們會感知到連續但稍微較暗的光。透過高速依序循環一系列 LED,它們看起來就像同時亮起,形成穩定的顯示效果。
直接驅動 LED 與多工陣列
使用微控制器原生腳位直接驅動 LED,主要有兩種方式:
- 直接驅動:透過限流電阻,將一顆 LED 連接到一個專用 GPIO 腳位。雖然程式簡單,但擴展性很差,因為每個光源都會消耗一整個腳位,而且很快就會碰到晶片封裝總電流限制。
- 多工掃描:將 LED 排列成電氣網格,或使用特殊配置,例如 Charlieplexing。像素會共用實體連線,代表微控制器會在時間上快速切換特定線路,用較少腳位來定位個別座標。
Arduino LED 多工控制技術比較
下表整理了直接使用腳位擴展 LED 的核心取捨。
| 技術 | 所需腳位數量(64 顆 LED) | CPU 負載 | 硬體複雜度 | 峰值電流壓力 | 最佳使用情境 |
|---|---|---|---|---|---|
| 直接驅動 | 64(Uno 無法實現) | 無 | 非常低 | 無 | 少量狀態指示燈 |
| 列欄矩陣掃描 | 16(8 列 + 8 欄) | 高 | 中等 | 高(共用腳位供電) | 標準網格顯示、符號顯示 |
| Charlieplexing 陣列 | 9 腳位(N x (N-1)) | 高 | 高 | 非常高 | 低功耗穿戴裝置、徽章 |
列欄矩陣掃描:16 個腳位驅動 64 顆 LED
矩陣掃描會將 LED 排列成交錯的列與欄。透過將 64 顆 LED 組成 8x8 網格,我們可以將每一列的陽極連接在一起,並將每一欄的陰極連接在一起。這樣只需要 16 個腳位,就能單獨定位每一個像素,將實體腳位需求降低 75%,並簡化 Arduino LED 矩陣掃描邏輯。
Arduino LED Charlieplexing
Charlieplexing 是一種進階多工方法,利用微控制器 GPIO 腳位的三態邏輯(HIGH、LOW 與高阻抗 INPUT)。透過將 LED 以反向並聯成對放置,Charlieplexing 能有效擴展,讓 N 個腳位驅動 N * (N - 1) 顆 LED。
LED 矩陣與 Charlieplexing 比較
- 腳位效率:Charlieplexing 的腳位效率明顯更高。8x8 列欄矩陣需要 16 個腳位才能驅動 64 顆 LED,而 Charlieplexing 只需要 9 個腳位就能達到類似容量,最多可驅動 72 顆 LED。
- 韌體複雜度:標準列欄掃描只需要在二進位 HIGH 與 LOW 狀態之間切換腳位。Charlieplexing 則需要在核心執行迴圈中,動態切換腳位方向,在輸出與高阻抗輸入之間切換。
選擇正確的多工方法
如果你需要一致亮度、較簡單的佈線,以及標準網格排列,請選擇列欄矩陣掃描。如果你的專案有非常嚴格的實體腳位限制,例如小型穿戴式設計,且可以接受較低的整體顯示工作週期,則可選擇 Charlieplexing。
如何製作 Arduino 8x8 LED 矩陣
8x8 矩陣是學習網格控制的理想起點。
共陽極與共陰極 LED 矩陣
由於 8x8 LED 矩陣是由交錯二極體組成的網格,因此每個矩陣在物理上同時具備共陽極與共陰極特性,取決於你分析的是哪一個軸。製造商的零售標示通常是指「列」的極性配置:
- 列共陽極(欄共陰極):同一列中的所有 LED 共用陽極(正極),而欄連接到共用陰極(負極)。若要點亮某個像素,例如第 1 列第 1 欄,必須將第 1 列拉 HIGH(source),並將第 1 欄拉 LOW(sink)。
- 列共陰極(欄共陽極):同一列中的所有 LED 共用陰極(負極),而欄連接到共用陽極(正極)。若要點亮像素,必須將第 1 列拉 LOW(sink),並將第 1 欄拉 HIGH(source)。
Arduino LED 矩陣接線圖
以下是標準列共陽極(欄共陰極)8x8 Arduino LED 矩陣的概念接線方式,由 Arduino 直接驅動。
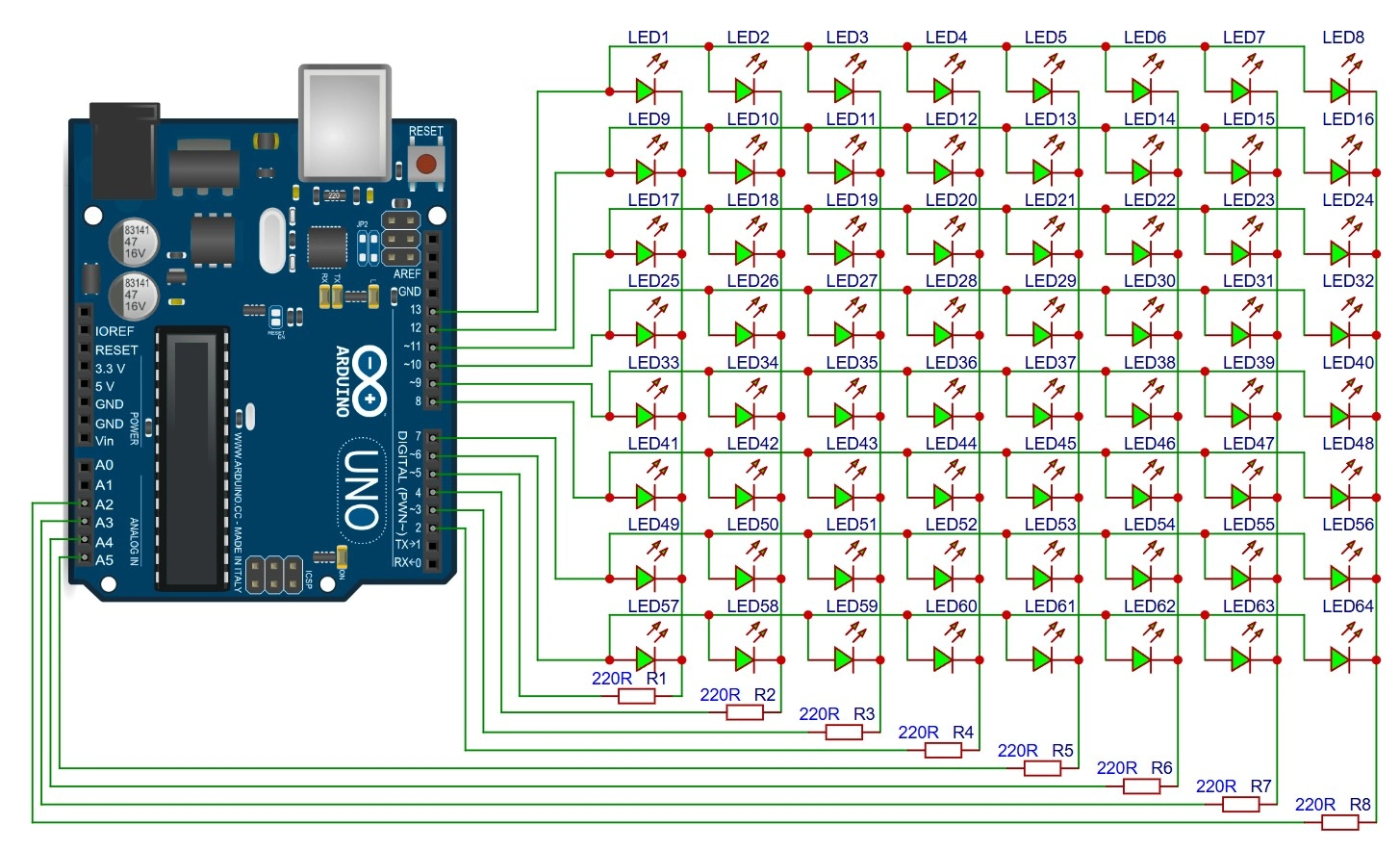
圖:連接到 Arduino Uno 的 8x8 列共陽極(欄共陰極)LED 矩陣示意圖,顯示列腳位連接到陽極,欄腳位則透過電阻連接到陰極。
LED 矩陣電阻放置位置
你必須將限流電阻放在欄上,而不是列上;反之亦然,取決於正在掃描的軸。
- 為什麼重要:如果你將電阻放在列上並以列掃描,該列中 LED 的亮度會根據同一列中有多少 LED 被點亮而改變。如果只有 1 顆 LED 亮起,它會很亮;如果 8 顆全亮,電流會被分配,導致它們非常暗。
- 解法:每一條獨立驅動的列線或欄線配置一顆電阻。依掃描軸而定,例如列掃描或欄掃描,這能確保電流分布一致,並避免亮度不均,因為可用電流會在已啟用的 LED 之間共享。
可使用以下基本公式計算電阻值:

以標準 5V 電源來說,可參考下表快速計算:
| LED 顏色 | 典型 V_forward | 5V 下建議電阻(約 15 mA) |
|---|---|---|
| 紅色 | 2.0V | 220 ohms |
| 綠色 | 2.2V | 220 ohms |
| 藍色 | 3.2V | 120 ohms |
| 黃色 | 2.1V | 220 ohms |
警告:
脈衝電流必須嚴格保持在 LED 資料表限制範圍內。雖然脈衝工作週期允許較高峰值電流,但如果程式錯誤導致掃描停止,而高電流仍維持啟用,LED 很快就會燒毀。
Arduino LED 矩陣刷新率計算
為了達到穩定顯示並消除可見閃爍,矩陣必須每秒至少完整掃描 60 次(60 Hz)。若要得到順暢刷新效果,建議使用 100 Hz 至 200 Hz。若要避免智慧型手機相機的 rolling-shutter 閃爍,可能還需要更高刷新率。
| 矩陣尺寸 | 掃描方法 | 最低刷新率 | 目標刷新率 | 每列/欄啟用時間 |
|---|---|---|---|---|
| 4x4 |
逐列掃描
(4 個步驟) |
60 Hz | 100 Hz | 2.50 ms |
| 8x8 |
逐列掃描
(8 個步驟) |
60 Hz | 100 Hz | 1.25 ms(1250 us) |
| 16x16 |
逐列掃描
(16 個步驟) |
80 Hz | 200 Hz | 0.31 ms(312 us) |
以一個 8 列矩陣為例,若以 100 Hz 一次掃描一列:
總畫面週期 = 1 / 100 Hz = 10 ms
每列啟用時間 = 10 ms / 8 列 = 1.25 ms(1250 微秒)
Arduino 必須每 1.25 毫秒切換一次列。
Arduino 8x8 LED 矩陣 millis() 程式碼
使用非阻塞式 millis() 或 micros() 計時非常重要,這樣 Arduino 才能在更新顯示器的同時處理其他任務,例如讀取感測器或序列通訊。
程式碼重點:
- 初始化列與欄:在 setup() 中設定腳位方向與基準關閉狀態。
- 使用非阻塞 micros():執行低負載排程器,根據經過時間觸發刷新狀態,而不是使用阻塞式 delay()。
- 每個掃描週期更新一列:選擇性將列拉 HIGH,並將啟用欄拉 LOW,每個 tick 逐列切換。
// 全域變數與圖案定義
const int rowPins[8] = {13, 12, 11, 10, 9, 8, 7, 6};
const int colPins[8] = {5, 4, 3, 2, A5, A4, A3, A2};
byte heartPattern[8] = {
B00000000,
B01100110,
B11111111,
B11111111,
B11111111,
B01111110,
B00111100,
B00000000
};
unsigned long lastScanTime = 0;
const unsigned long scanInterval = 1250;
int currentRow = 0;// Setup 函式
void setup() {
for (int i = 0; i < 8; i++) {
pinMode(rowPins[i], OUTPUT);
pinMode(colPins[i], OUTPUT);
digitalWrite(rowPins[i], LOW);
digitalWrite(colPins[i], HIGH);
}
}// 主迴圈
void loop() {
unsigned long currentMicros = micros();
if (currentMicros - lastScanTime >= scanInterval) {
lastScanTime = currentMicros;
digitalWrite(rowPins[currentRow], LOW);
for (int col = 0; col < 8; col++) {
digitalWrite(colPins[col], HIGH);
}
currentRow = (currentRow + 1) % 8;
for (int col = 0; col < 8; col++) {
if (bitRead(heartPattern[currentRow], 7 - col) == 1) {
digitalWrite(colPins[col], LOW);
}
}
digitalWrite(rowPins[currentRow], HIGH);
}
}上方使用的標準 digitalWrite() 函式簡單且非常適合教學清楚呈現,但速度相對較慢。每次呼叫 digitalWrite() 都會執行許多執行期間安全檢查,例如檢查腳位是否支援 PWM、解析連接埠暫存器查找表等,可能消耗最多 4 微秒的處理時間。
進階且對效能要求高的專案,常會透過直接連接埠操作來繞過這個限制,例如寫入 PORTD |= B00000100;,這可在單一時脈週期內執行,在 16 MHz 微控制器上只需 62.5 奈秒;或使用硬體計時器中斷,以達到最佳掃描效率。
Arduino LED 矩陣電流消耗
設計多工顯示器時,必須在峰值電流與平均電流之間取得平衡。
- 峰值電流:當某一列或欄完全啟用時所抽取的最大電流。如果同一欄中有 8 顆 LED 同時亮起,驅動電路必須承受這個累積突波。
- 平均電流:由於存在啟用工作週期,例如 8x8 矩陣中每一畫面的 1/8,單顆 LED 的平均功耗會比連續驅動低很多。
- USB 電流限制:標準電腦 USB 2.0 連接埠供電電流限制為 500 mA。大型 Arduino LED 矩陣專案經常超出 USB 供電限制。若直接透過 USB 為多工陣列供電,請確保合併峰值電流,包括 Arduino 內部額外消耗約 50 mA,遠低於此門檻,以避免連接埠重置。
如何實作 Arduino LED Charlieplexing
Charlieplexing 是一種用最少腳位控制大量 LED 的高效率方法,但它需要精準控制腳位狀態。
Charlieplexing 的三態 GPIO 邏輯
標準微控制器腳位有三種狀態:HIGH(5V)、LOW(0V)與 INPUT。當設定為 INPUT 時,腳位會進入高阻抗(Hi-Z)狀態,作用如同開路。Charlieplexing 利用這個狀態來隔離特定 LED 對。任何沒有主動驅動當前畫面的腳位,都會被設定為輸入狀態,以阻斷電流流動。
Charlieplexing LED 數量公式
使用 N 個腳位最多可驅動的 LED 數量計算如下:
這種數學擴展非常有效率。例如,3 個腳位只能控制 6 顆 LED,但只要增加到 6 個腳位,就可以驅動最多 30 顆 LED。
下表顯示隨著腳位增加,輸出規模如何快速提升:
| 控制腳位數(N) | 最大 LED 數量 | 處於 High-Z 狀態的未使用腳位 |
|---|---|---|
| 3 | 6 | 1 |
| 4 | 12 | 2 |
| 5 | 20 | 3 |
| 6 | 30 | 4 |
| 10 | 90 | 8 |
Charlieplexing 接線圖
要理解 Charlieplexing 如何運作,將反向並聯 LED 配置的電路圖視覺化會很有幫助。以下是三個腳位控制六顆 LED 的 Charlieplexed 節點示意圖:
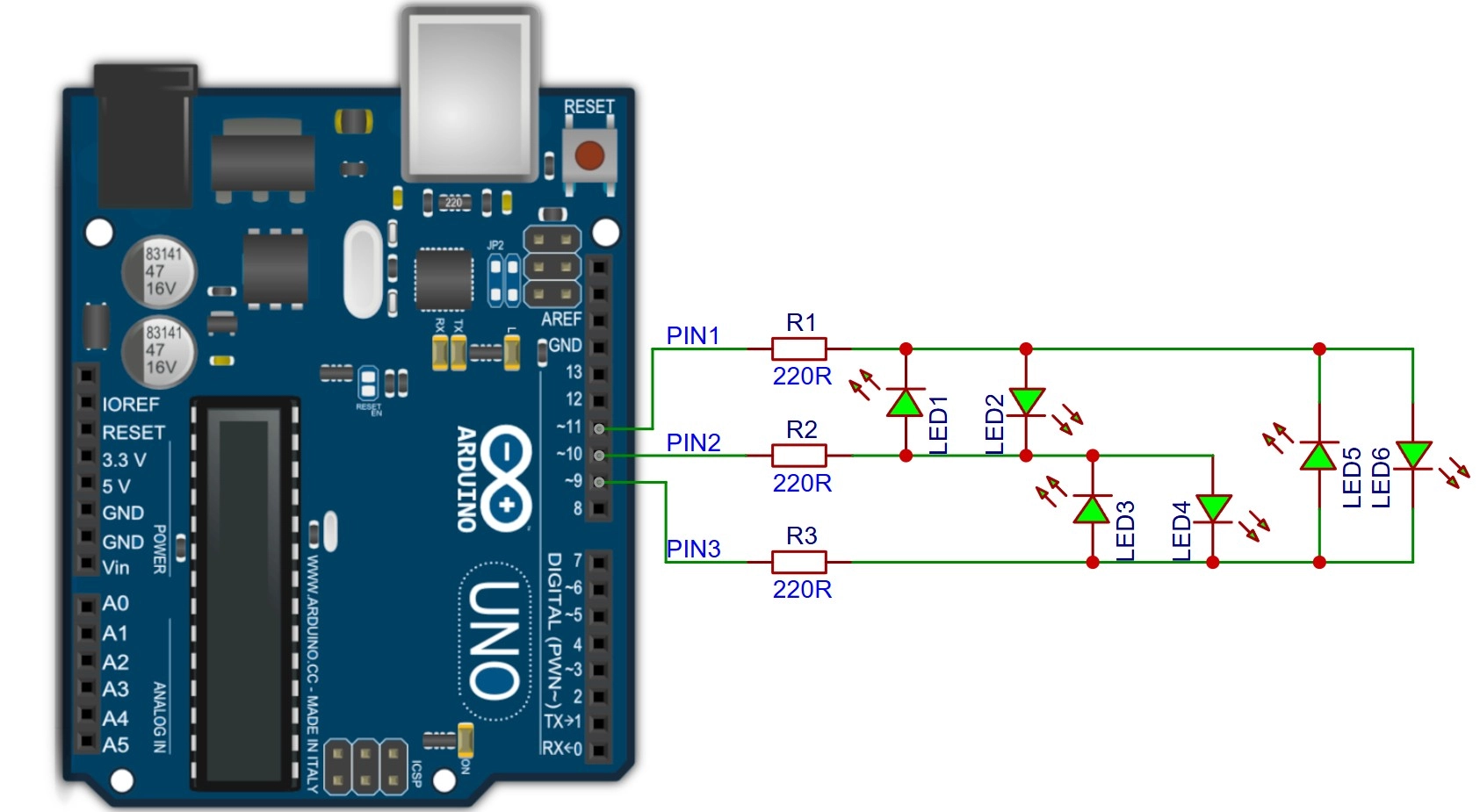
圖:Charlieplexing 電路圖,顯示 3 個 Arduino 腳位透過反向並聯 LED 對控制 6 顆 LED,並在每個腳位分支上配置電阻。
Arduino Charlieplexing pinMode() 程式碼
驅動單顆 LED 時,需要將 source 腳位設為 OUTPUT HIGH,將 sink 腳位設為 OUTPUT LOW,並將所有其他腳位設為 INPUT(Hi-Z)。
程式碼重點:
- 清除先前啟用腳位:迭代所有腳位並將其重設為 INPUT,以確保沒有殘留路徑保持啟用。
- 動態設定 source 與 sink:使用與目標 LED 對應的 switch-case 狀態機,重新配置腳位方向與狀態。
// 腳位定義
const int pins[3] = {9, 10, 11};// turnOnLED() 輔助函式
void turnOnLED(int ledIndex) {
for (int i = 0; i < 3; i++) {
pinMode(pins[i], INPUT);
digitalWrite(pins[i], LOW);
}
switch(ledIndex) {
case 1:
pinMode(pins[0], OUTPUT); digitalWrite(pins[0], HIGH);
pinMode(pins[1], OUTPUT); digitalWrite(pins[1], LOW);
break;
case 2:
pinMode(pins[1], OUTPUT); digitalWrite(pins[1], HIGH);
pinMode(pins[0], OUTPUT); digitalWrite(pins[0], LOW);
break;
case 3:
pinMode(pins[1], OUTPUT); digitalWrite(pins[1], HIGH);
pinMode(pins[2], OUTPUT); digitalWrite(pins[2], LOW);
break;
}
}// Setup
void setup() {}// 主迴圈
void loop() {
for (int i = 1; i <= 3; i++) {
turnOnLED(i);
delay(5);
}
}Charlieplexing 亮度限制
由於標準 Charlieplexing 實作一次只能點亮一顆 LED,隨著你加入更多 LED,任何單顆 LED 的工作週期都會顯著下降。如果你正在驅動 30 顆 LED,每顆 LED 最多只會在掃描畫面的 1/30 時間內亮起。這種低工作週期會讓顯示看起來明顯變暗。
Charlieplexing 鬼影修正
當漏電流經由替代二極體路徑流動,讓未啟用 LED 微微亮起時,就會產生鬼影。這通常是因為腳位狀態切換太慢,或使用了不匹配的 LED。請務必透過在切換啟用狀態之間加入極短的 blanking delay 來解決,例如將所有腳位設定為 INPUT 50 微秒。
Arduino LED 多工控制故障排除
#1 LED 閃爍修正:提高掃描速率
如果你看到明顯脈動,代表掃描速率太慢。提高計時器或中斷頻率,讓完整畫面刷新率超過 80–100 Hz。請保持 ISR(中斷服務常式)程式碼輕量,並避免使用 analogRead() 或 delay() 這類慢速函式。
#2 LED 過暗修正:降低工作週期損失
多工顯示器的亮度會是標準連續亮度的一小部分。為了補償,你可以讓 LED 以高於連續額定值的電流進行脈衝驅動。有些 LED 在低工作週期下支援較高脈衝電流。請先查閱 LED 資料表中的峰值脈衝限制,再降低電阻以提升亮度。
#3 多工顯示中的 LED 鬼影修正
如果啟用像素滲入鄰近欄位,原因通常是驅動腳位中的殘留電荷。在將啟用列拉高之前:
-
關閉所有欄,將其設定為高電位/非啟用狀態。
-
切換列。
-
重新開啟欄。
這個順序稱為 blanking,可防止狀態轉換期間出現漏電流。
#4 LED 整列或整欄不亮修正
如果整列或整欄無法亮起,通常很少是單顆 LED 燒壞造成。接線錯誤、短路或二極體方向錯誤,都可能讓整列或整欄失效。請使用萬用表的二極體測試模式檢查系統。如果你使用表面黏著元件(SMD),請在放大倍率下檢查電路板是否存在冷焊或焊點微裂。確保 PCB 上有正確的焊盤設計,可避免這些組裝問題。
#5 Charlieplexing 漏電流問題
Charlieplexing 對 LED 順向電壓差異非常敏感。如果你在同一组三態線路上混用紅色 LED(2.0V)與藍色 LED(3.2V),當腳位處於高阻抗模式時,電流會經由較低電壓 LED 洩漏,造成嚴重鬼影。請務必在 Charlieplexed 網路中使用順向電壓一致且匹配的相同 LED。
實用 Arduino LED 多工控制專案
#1 8x8 LED 矩陣動畫
使用直接 GPIO 矩陣掃描,你可以撰寫自訂陣列依序播放畫面,製作簡單的 8x8 像素藝術動畫、復古遊戲素材或狀態圖示,不需要額外硬體元件。
#2 4x4x4 LED 立方體多工控制
3D LED 立方體使用空間多工控制。透過將 16 個垂直欄的陽極直接連接到 16 個 Arduino GPIO 腳位,並使用 4 個獨立腳位依序切換 4 個共陰極水平平面,你就能在 3D 空間中個別定位所有 64 顆 LED。
#3 Charlieplexed LED 徽章
由於 Charlieplexing 完全不需要外部輔助 IC,因此非常適合小型、超輕量的穿戴式胸針與徽章。它能讓你只用 5 條細走線連接到微型微控制器,就運行 20 顆互動式狀態燈陣列。
#4 LED 矩陣專案的客製化 PCB
雖然麵包板非常適合原型開發,但多工 LED 電路很快就會變成一團雜亂跳線,導致連接鬆動、寄生電容與高電阻問題。
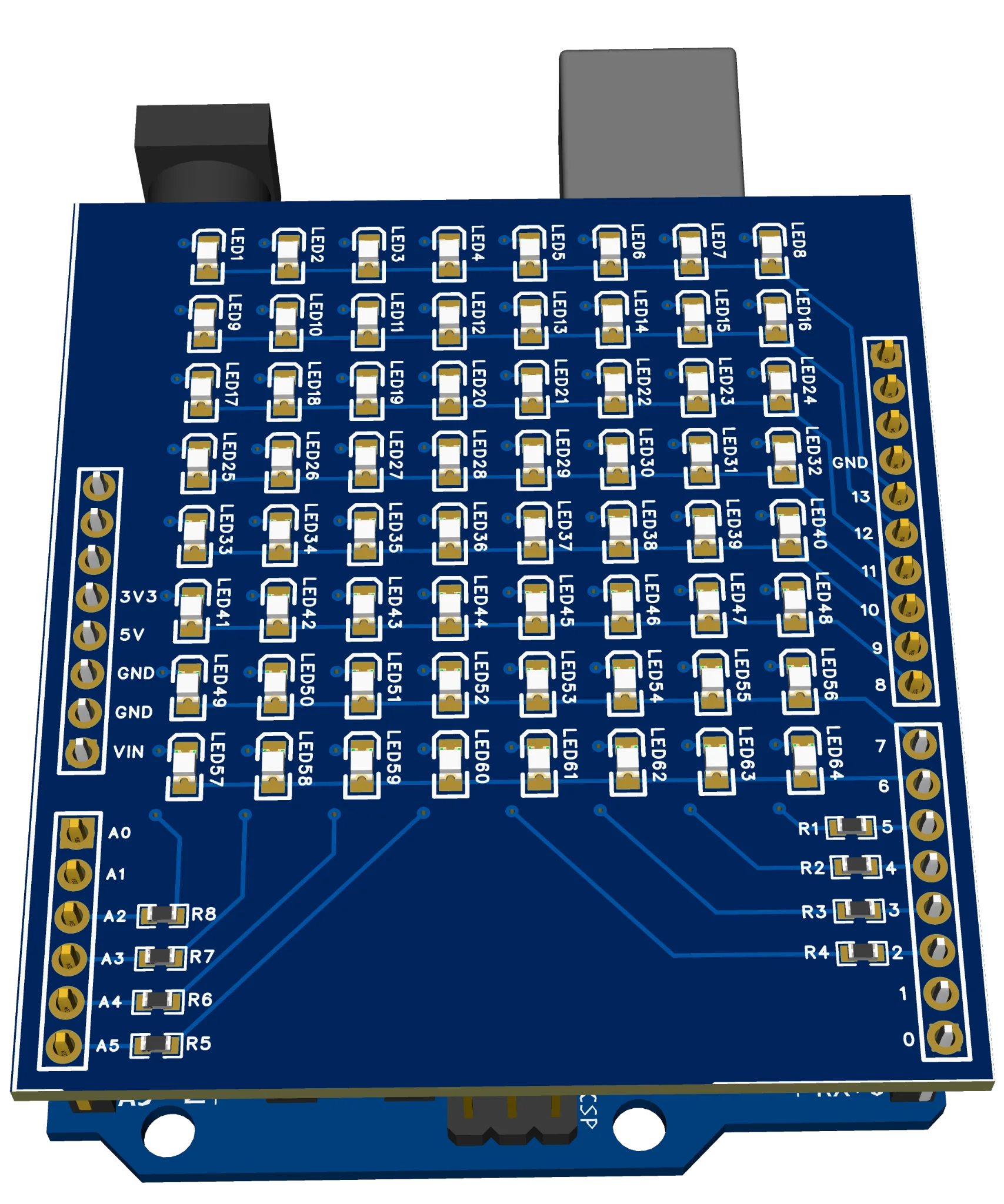
圖:客製化 Arduino Uno Shield PCB 的 3D 渲染圖,顯示乾淨的走線、SMT 元件與 8x8 LED 矩陣。
對於包含大量 SMD LED、電阻或驅動 IC 的設計,JLCPCB 也提供元件採購與PCB 組裝服務。專業 SMT 組裝與回流焊可減少手工組裝工作,同時確保一致的製造品質。
結論
直接軟體式 LED 多工控制,讓小型微控制器能透過仔細的掃描時序與共用接線架構控制大型顯示器。雖然直接 GPIO 矩陣掃描與 Charlieplexing 對軟體處理要求較高,但它們提供了一種極低成本、極簡且非常具教育意義的方式,可繞過硬體腳位限制。
設計客製化佈局、匯出標準 Gerber,並使用像 JLCPCB PCB 組裝這樣的專業 SMT 製造服務,可確保完美 PCB 焊接與可靠顯示運作,讓你的電子專案達到商用品質完成度。
Arduino LED 多工控制常見問題
Q:Arduino 在沒有外部 IC 的情況下可以控制多少顆 LED?
使用標準直接驅動時,Arduino Uno 大約可以驅動 15–20 顆 LED。若使用 16 個腳位進行 8x8 直接矩陣掃描,可驅動 64 顆 LED。如果使用 18 個可用腳位實作 Charlieplexing,理論上最多可直接驅動 306 顆 LED(18 x 17)。
Q:Multiplexing 與 Charlieplexing 有什麼差異?
標準列欄多工控制使用網格,腳位會嚴格設定為二進位輸出(HIGH 或 LOW)。Charlieplexing 則利用微控制器腳位的三態邏輯,將未使用腳位設定為 INPUT(高阻抗),以隔離特定反向並聯二極體對,從而大幅降低腳位需求。
Q:LED 矩陣需要每顆 LED 都配置電阻嗎?
不需要。你只需要在掃描軸上的每一條啟用線配置一顆電阻,例如 8 條欄線上配置 8 顆電阻。這可確保在列掃描的任何瞬間,每一顆啟用 LED 都只會串接一顆電阻。
Q:為什麼多工 LED 會變暗?
因為多工 LED 是依序亮滅,它們的工作週期會下降。在 8 列掃描矩陣中,每顆 LED 只有 1/8 的時間處於啟用狀態,平均電流會大幅降低,因此在人眼看來會稍微變暗。
Q:避免閃爍的最低刷新率是多少?
要消除可見脈動,絕對最低刷新率為 60 Hz。若要舒適觀看且不造成眼睛疲勞,建議目標掃描率為 100 Hz 或更高。
持續學習
ESP32 與 Raspberry Pi:2026 年該如何選擇?
電池供電的智慧農業感測器與採用電腦視覺的工業檢測相機,雖然都屬於「物聯網(IoT)」範疇,但兩者的硬體需求截然不同。ESP32 與 Raspberry Pi 經常是硬體選型的核心,工程師卻常將它們視為可以直接替代的產品來比較。 實際上,前者專為超低功耗與確定性即時控制而設計,後者則將 Linux 多工處理及高運算效能帶到邊緣端。 本指南將說明: MCU 與 SBC 的架構差異 ESP32 與 Raspberry Pi 的效能及功耗比較 ESP32 與 Raspberry Pi 在物聯網及機器人領域的應用 ESP32 上的 TinyML 與 Raspberry Pi 上的邊緣 AI 同時採用兩種平台的混合式邊緣 AI 架構 ESP32 與 Raspberry Pi 專案的 PCB 設計注意事項 圖:ESP32-S3 與 Raspberry Pi 5 比較,並標示主要特色。 ESP32 與 Raspberry Pi 快速比較 若是電池供電的物聯網節點、即時感測器控制及裝置端 TinyML 推論,ESP32 是較合適的選擇。 Raspberry Pi 則適合 Linux 多工處理、電腦視覺及邊緣 AI ......
LED 符號指南:意義、電路圖、極性與類型
LED 符號是現代電路設計中最常用的電子符號之一。您會在電源指示燈、微控制器電路及 RGB 照明系統中看到 LED 符號。 無論是閱讀簡單電路圖,還是設計複雜的多層 PCB,瞭解 LED 電路圖符號都是正確閱讀及設計電子電路的基本能力。本指南將完整介紹發光二極體符號,從基本結構一路說明至實際 PCB 工作流程。 本指南將說明: LED 符號圖及其意義 極性:陽極與陰極 LED、一般二極體與光電二極體的差異 如何閱讀 LED 電路 符號方向規則 SMD 與 THT LED 符號 RGB LED 符號基礎 LED 封裝尺寸:0402、0603、5050 從電路圖到 PCB 圖:LED 電路圖符號,以及印刷電路板上發光中的實體 LED。 什麼是 LED 符號? LED 符號是在二極體符號旁加上兩個向外箭頭,用來表示光線向外發射。 更精確地說,它是發光二極體(Light Emitting Diode)的電路圖表示方式。 符號由指向垂直線的三角形,也就是標準二極體形狀,以及兩個代表光子發射的斜向箭頭組成。 此符號由最新版 IEC 60617 定義;這是目前仍有效的國際電路圖圖形符號標準。 注意事項 先前的 ......
如何讀懂 MOSFET 符號:NMOS、PMOS、箭頭與本體二極體
如果您曾經打開原理圖,看著 MOSFET 符號困惑哪個端子是源極、為什麼閘極中間有間隙,或為什麼兩個看似相同的符號箭頭方向卻不同——您並不孤單。 MOSFET 原理圖符號會在一個小圖形中包含四項獨立資訊:通道極性、工作模式、端子識別,以及元件類型。只要正確讀懂這四個線索,無論是在功率電子資料表、CMOS 邏輯圖,還是 EDA 元件庫中遇到 MOSFET 符號,都能立刻看懂。 本指南涵蓋內容: 如何識別 NMOS 與 PMOS 符號 IEEE/IEC 符號與簡化 IC 符號中的箭頭方向如何不同 增強型與耗盡型 MOSFET 符號 三端子與四端子 MOSFET 符號 功率 MOSFET 中的本體二極體方向 資料表、CMOS 原理圖與 EDA 工具中使用的 MOSFET 符號慣例 如何讀懂 MOSFET 符號:5 個視覺線索 圖:N 通道增強型 MOSFET 符號的原理圖拆解 特徵 意義 箭頭向內 NMOS(詳細樣式) 箭頭向外 PMOS(詳細樣式) 虛線通道 增強型(常關,Normally OFF) 實線通道 耗盡型(常通,Normally ON) 閘極泡泡 PMOS(IC 樣式) 這五個視覺線索,足......
斷路器符號解析:IEC、ANSI、MCB 與極數配置符號
電氣原理圖是電力系統、控制電路與印刷電路板的通用語言。在這些圖面中,斷路器符號是最關鍵的元素之一。正確理解它,對安全、故障排查與製造都至關重要。 即使只是把斷路器與手動開關或隔離開關混淆,也可能在工廠現場或維修作業中造成災難性的誤判。 本指南提供一份完整且技術準確的參考,協助您閱讀與繪製斷路器符號,重點涵蓋實際工業型錄、單線圖與標準 CAD 圖面配置。 電氣圖面中斷路器符號的意義 在診斷或安裝原理圖中,斷路器符號表示電力網路中的某個位置,在該處電流可以被手動切換,或在異常情況下自動切斷。它告訴工程師,依據基本接點上附加的限定符號,該電路分支可能受到熱過載、短路或接地漏電保護。 斷路器符號參考表 以下快速參考表,整理了住宅配線圖、工業控制盤與 PCB 設計中常見的標準符號。 IEC 斷路器符號 標準 IEC 帶叉開關:帶有叉號或星號限定符的斜向開關接點。這是標準歐洲原理圖符號。 具隔離功能的斷路器:帶有叉號/星號限定符的斜向接點,並在端子處加入垂直短線。 ANSI 斷路器符號 ANSI 方框符號:位於導線上的方形方框。這是北美標準單線圖符號。 ANSI 接點間隙:標準開關接點間隙,並帶有小型弧形圖形......
Arduino LED 驅動器教學:使用 74HC595 與 MAX7219 控制更多 LED
在較大型的 LED 專案中,Arduino GPIO 腳位很快就會不夠用。透過使用專用 LED 驅動器與擴充 IC,你可以大幅減少腳位使用量,消除占用處理器資源的多工掃描迴圈,並簡化顯示器接線。 在本指南中,你將了解 74HC595 移位暫存器與 MAX7219 LED 驅動器的運作架構、接線配置、級聯技巧與最佳化策略。 為什麼 Arduino 專案需要 LED 驅動 IC Arduino GPIO 與電流限制 基於 ATmega328P 的 Arduino Uno 具有實體限制,使其不可能直接驅動大規模 LED: 單一腳位最大電流:單一數位 I/O 腳位可安全連續供應或吸收的最大電流為 20 mA連續電流,絕對峰值限制為 40 mA。 整體封裝限制:流經微控制器主要 VCC 與 GND 腳位的總電流不得超過 200 mA。 實體腳位不足:Arduino Uno 只有 14 個數位 I/O 腳位與 6 個類比輸入腳位。 如果你嘗試同時驅動 16 顆標準 15 mA LED,就會要求微控制器封裝提供 240 mA 電流,這會違反安全工作範圍,並可能導致矽晶片瞬間熱損毀。 LED 多工控制與 LED ......
二極體測試終極指南:萬用表設定、讀值與診斷
快速答案:如何測試二極體 若要使用萬用表檢查二極體,請將裝置設定為二極體測試模式。 將紅色表筆接在陽極,黑色表筆接在陰極。 健康的矽二極體在正向偏壓下,良好讀值通常為 0.5V 至 0.8V;在反向偏壓下則會顯示 OL(Open Loop,開路)。 判斷二極體是否損壞其實很簡單:兩個方向都顯示 OL,代表二極體開路;兩個方向都接近 0V,則代表二極體短路。 了解如何測試二極體,是排查故障電源供應器、異常電路,或無法上電 PCB 的最快方法之一。使用數位萬用表,你可以快速判斷二極體是否正常工作、短路或開路。 本指南將說明如何將萬用表設定為二極體測試模式、讀取正向偏壓與反向偏壓數值、分辨良好二極體與開路或短路二極體、比較電路內與電路外測試,以及處理特定類型二極體,包括整流二極體、蕭特基二極體、齊納二極體、LED 與橋式整流器。 二極體極性:如何辨識陽極與陰極 了解二極體極性,是成功測試二極體的第一步: 電流方向:在正向偏壓下,電流會從陽極,也就是正端,流向陰極,也就是負端。 實體標記:軸向二極體上的印刷條紋或色環,標示的是陰極側。對表面黏著二極體而言,請尋找小橫線或雷射蝕刻線。 電路圖符號:符號由指向......